↓
跳过正文
南巷
博客
项目
科研成果
比赛
简体中文
简体中文
English
无障碍设定
禁用模糊效果
禁用背景图片
显示链接下划线
啟用阅读模式
字体大小
default
12px
14px
16px
18px
20px
22px
24px
博客
项目
科研成果
比赛
简体中文
简体中文
English
无障碍设定
禁用模糊效果
禁用背景图片
显示链接下划线
啟用阅读模式
字体大小
default
12px
14px
16px
18px
20px
22px
24px
从模型结构到真实系统的项目沉淀。
精选项目覆盖 VLA/机器人操作、多模态大模型、LLM/MoE、语义分割、通用训练框架和开源工程实践。
LeRobot pi0.5 + SO-101:双任务机械臂操作
2026/06/01
·
2 分钟
项目
LeRobot
Pi0.5
SO-101
Robot Manipulation
星语 pi0:VLA 模型源码拆解与最小复现
2026/05/20
·
1 分钟
项目
Pi0
VLA
Attention
Action Prediction
星语 Vision:自研多模态大模型
2026/05/01
·
1 分钟
项目
CLIP
VLM
LoRA
Image-Text
CodeLab-LLaMA2 / 星语 MoE:大模型训练实践
2026/04/15
·
9 分钟
项目
LLaMA2
Transformer
MoE
SFT
LoRA
RAG
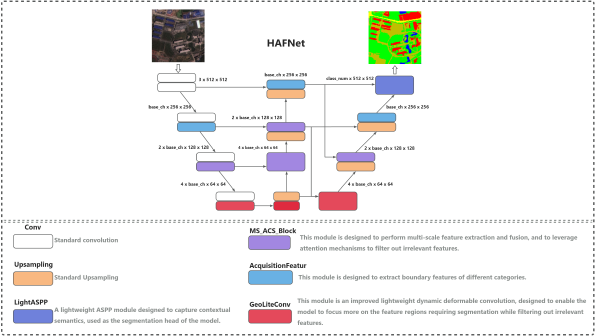
HAFNet:轻量化语义分割网络
2026/02/10
·
1 分钟
项目
Semantic Segmentation
Lightweight
Feature Fusion
Attention
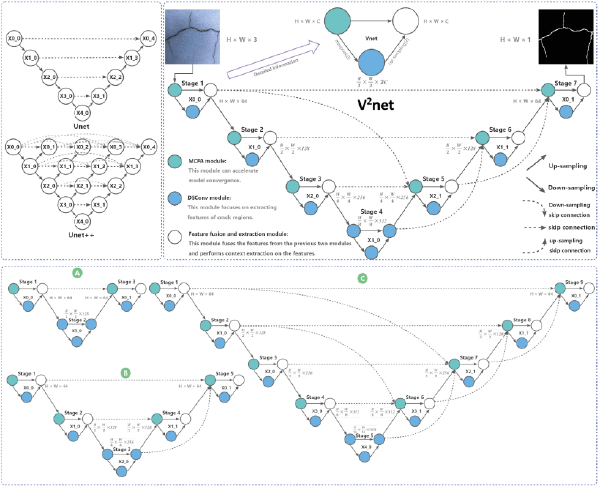
NxV2Net:裂缝分割科研代码
2026/01/10
·
1 分钟
项目
Crack Segmentation
VNet
MCFA
SUES-CRACK
Classification:通用图像分类训练模板
2025/02/15
·
1 分钟
项目
Classification
ResNet
EfficientNet
SwanLab
2018 Data Science Bowl:细胞核分割
2025/01/15
·
1 分钟
项目
Kaggle
Segmentation
U-Net
Medical Image
school_blog:前后端分离校园博客
2024/05/01
·
1 分钟
项目
Campus Blog
Frontend/Backend
PC Web
Mobile Web
WebSocket_Test:群聊与私聊实时通信
2024/04/01
·
1 分钟
项目
Real-Time
Messaging
HTML
Chat System
↑